|
|
VinaLC: Parallel Molecular Docking Program |
Biochemical and Biophysical Systems Group |
|
|
VinaLC: Parallel Molecular Docking Program |
Biochemical and Biophysical Systems Group |
#include <boost/math/quaternion.hpp>#include <boost/serialization/split_free.hpp>#include "common.h"#include "random.h"

Go to the source code of this file.
Namespaces | |
| namespace | boost |
| namespace | boost::serialization |
Typedefs | |
| typedef boost::math::quaternion< fl > | qt |
Functions | |
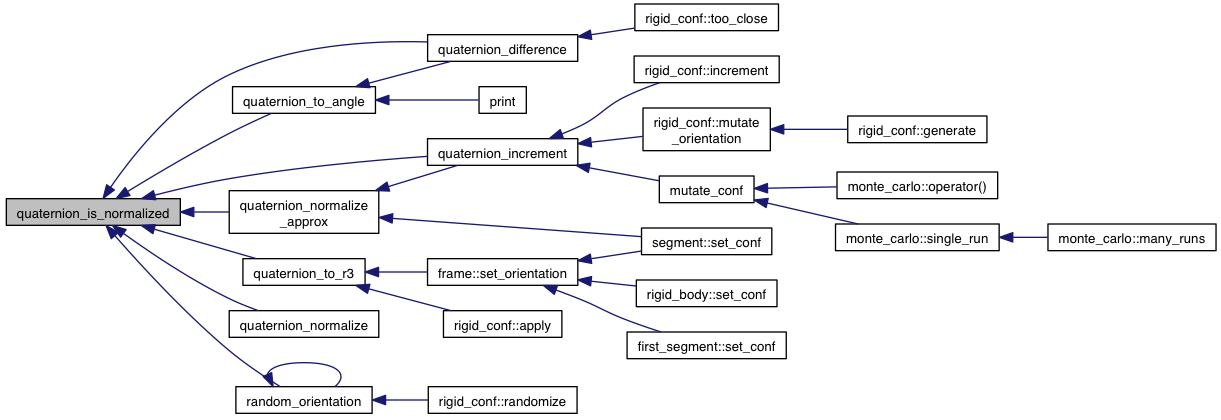
| bool | quaternion_is_normalized (const qt &q) |
| template<class Archive > | |
| void | boost::serialization::save (Archive &ar, const qt &q, const unsigned version) |
| template<typename Archive > | |
| void | boost::serialization::load (Archive &ar, qt &q, const unsigned version) |
| bool | eq (const qt &a, const qt &b) |
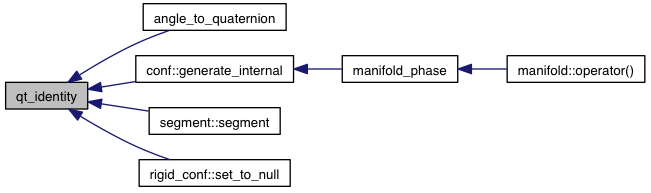
| const qt | qt_identity (1, 0, 0, 0) |
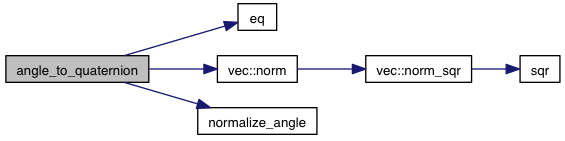
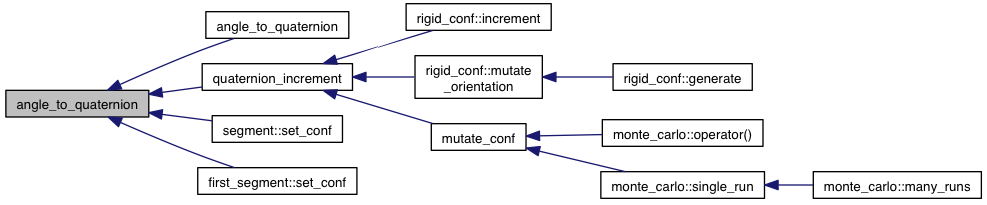
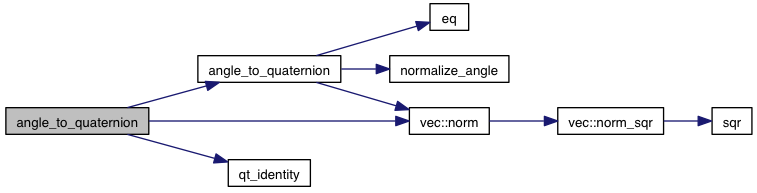
| qt | angle_to_quaternion (const vec &axis, fl angle) |
| qt | angle_to_quaternion (const vec &rotation) |
| vec | quaternion_to_angle (const qt &q) |
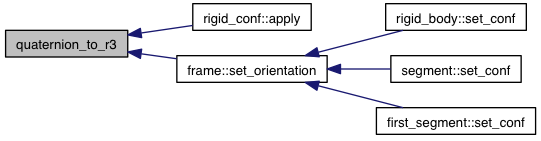
| mat | quaternion_to_r3 (const qt &q) |
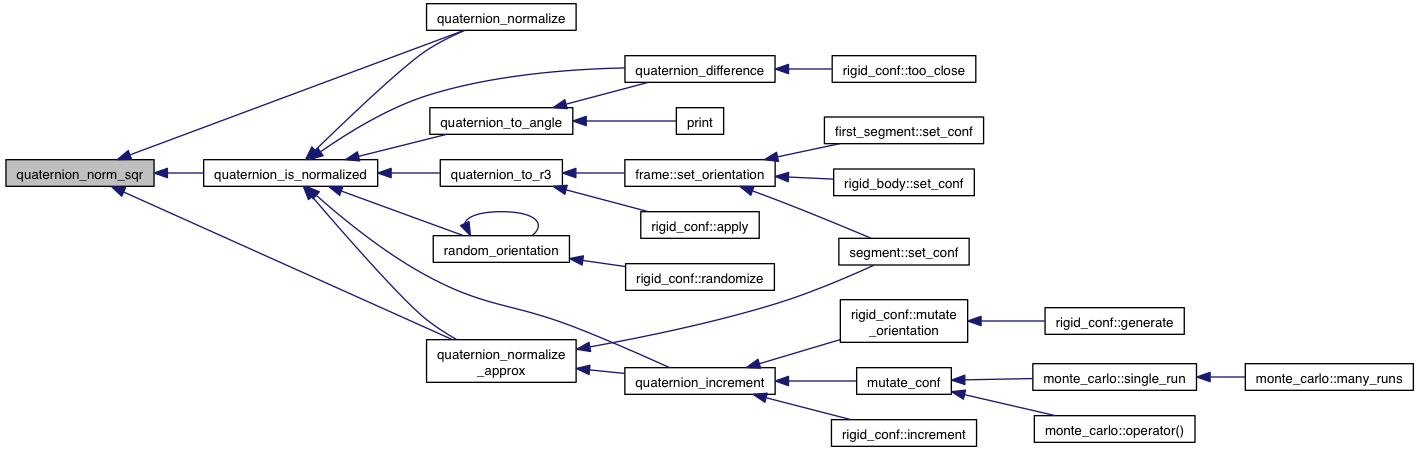
| fl | quaternion_norm_sqr (const qt &q) |
| void | quaternion_normalize (qt &q) |
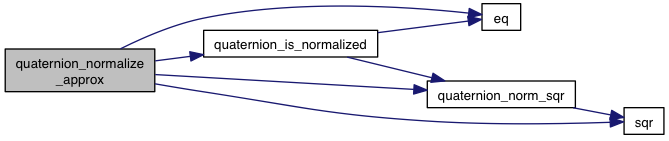
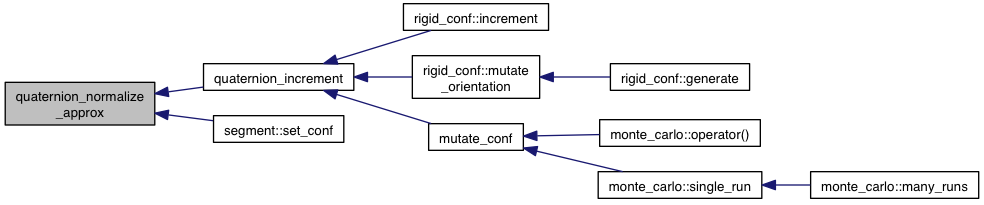
| void | quaternion_normalize_approx (qt &q, const fl tolerance=1e-6) |
| qt | random_orientation (rng &generator) |
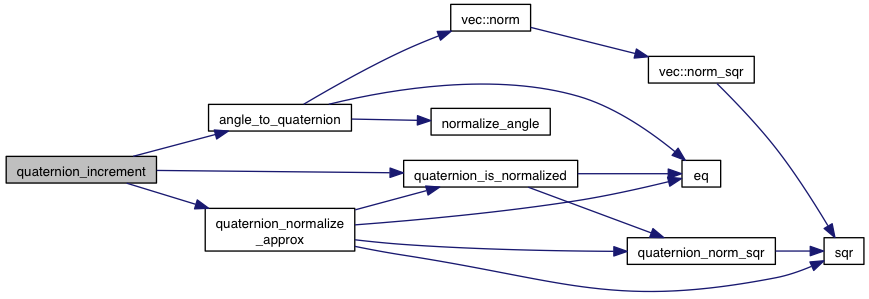
| void | quaternion_increment (qt &q, const vec &rotation) |
| vec | quaternion_difference (const qt &b, const qt &a) |
| void | print (const qt &q, std::ostream &out=std::cout) |
| bool quaternion_is_normalized | ( | const qt & | q | ) |
References eq(), and quaternion_norm_sqr().
Referenced by quaternion_difference(), quaternion_increment(), quaternion_normalize(), quaternion_normalize_approx(), quaternion_to_angle(), quaternion_to_r3(), and random_orientation().

| const qt qt_identity | ( | 1 | , |
| 0 | , | ||
| 0 | , | ||
| 0 | |||
| ) |
Referenced by angle_to_quaternion(), conf::generate_internal(), segment::segment(), and rigid_conf::set_to_null().
References eq(), vec::norm(), and normalize_angle().
Referenced by angle_to_quaternion(), quaternion_increment(), segment::set_conf(), and first_segment::set_conf().
References angle_to_quaternion(), epsilon_fl, vec::norm(), and qt_identity().
References epsilon_fl, pi, quaternion_is_normalized(), and zero_vec().
Referenced by print(), and quaternion_difference().


References eq(), and quaternion_is_normalized().
Referenced by rigid_conf::apply(), and frame::set_orientation().

References sqr().
Referenced by quaternion_is_normalized(), quaternion_normalize(), and quaternion_normalize_approx().

|
inline |
References epsilon_fl, eq(), quaternion_is_normalized(), quaternion_norm_sqr(), and sqr().
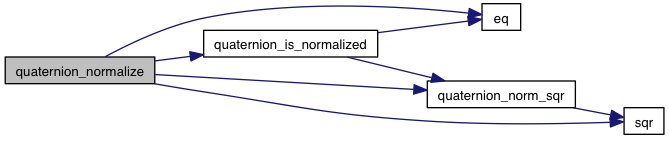
References epsilon_fl, eq(), quaternion_is_normalized(), quaternion_norm_sqr(), and sqr().
Referenced by quaternion_increment(), and segment::set_conf().
References epsilon_fl, quaternion_is_normalized(), random_normal(), and random_orientation().
Referenced by random_orientation(), and rigid_conf::randomize().


References angle_to_quaternion(), quaternion_is_normalized(), and quaternion_normalize_approx().
Referenced by rigid_conf::increment(), mutate_conf(), and rigid_conf::mutate_orientation().

References quaternion_is_normalized(), and quaternion_to_angle().
Referenced by rigid_conf::too_close().


| void print | ( | const qt & | q, |
| std::ostream & | out = std::cout |
||
| ) |
| |
LLNL-WEB-613932 |
Lawrence Livermore National Laboratory |
Operated by Lawrence Livermore
National Security, LLC, for the |

|

|

|

