|
|
VinaLC: Parallel Molecular Docking Program |
Biochemical and Biophysical Systems Group |
|
|
VinaLC: Parallel Molecular Docking Program |
Biochemical and Biophysical Systems Group |
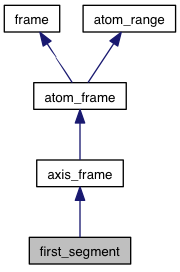
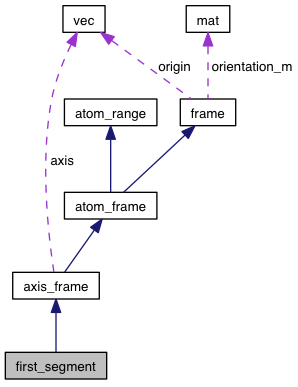
#include <tree.h>
Public Member Functions | |
| first_segment (const segment &s) | |
| first_segment (const vec &origin_, sz begin_, sz end_, const vec &axis_root) | |
| void | set_conf (const atomv &atoms, vecv &coords, fl torsion) |
| void | count_torsions (sz &s) const |
| void | set_derivative (const vecp &force_torque, fl &c) const |
| void | set_coords (const atomv &atoms, vecv &coords) const |
| vecp | sum_force_and_torque (const vecv &coords, const vecv &forces) const |
| vec | local_to_lab (const vec &local_coords) const |
| vec | local_to_lab_direction (const vec &local_direction) const |
| const qt & | orientation () const |
| const vec & | get_origin () const |
| template<typename F > | |
| void | transform (const F &f) |
Public Attributes | |
| sz | begin |
| sz | end |
Protected Member Functions | |
| void | set_orientation (const qt &q) |
Protected Attributes | |
| vec | axis |
| vec | origin |
| mat | orientation_m |
| qt | orientation_q |
|
inline |
|
inline |
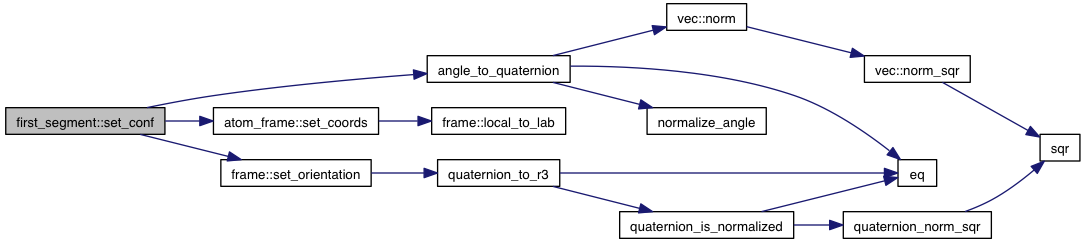
References angle_to_quaternion(), axis_frame::axis, atom_frame::set_coords(), and frame::set_orientation().
|
inline |
References axis_frame::axis.
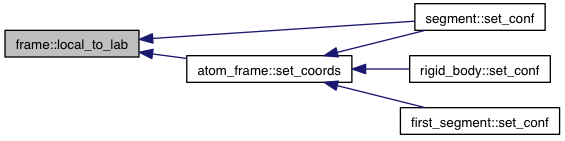
References atom_range::begin, atom_range::end, frame::local_to_lab(), and VINA_RANGE.
Referenced by rigid_body::set_conf(), segment::set_conf(), and set_conf().

|
inlineinherited |
References atom_range::begin, cross_product(), atom_range::end, frame::origin, and VINA_RANGE.

References frame::orientation_m, and frame::origin.
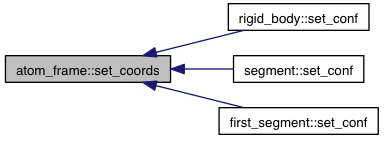
Referenced by segment::set_conf(), and atom_frame::set_coords().
References frame::orientation_m.
Referenced by segment::set_conf().

|
inlineinherited |
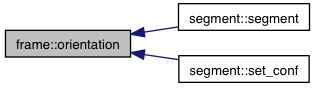
References frame::orientation_q.
Referenced by segment::segment(), and segment::set_conf().
|
inlineinherited |
References frame::origin.
Referenced by segment::segment().

|
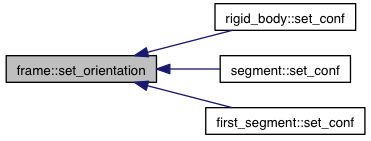
inlineprotectedinherited |
References frame::orientation_m, frame::orientation_q, and quaternion_to_r3().
Referenced by rigid_body::set_conf(), segment::set_conf(), and set_conf().

|
inlineinherited |
References atom_range::begin, and atom_range::end.
Referenced by appender::update().

|
protectedinherited |
Referenced by axis_frame::axis_frame(), segment::segment(), segment::set_conf(), set_conf(), and axis_frame::set_derivative().
|
protectedinherited |
|
protectedinherited |
Referenced by frame::local_to_lab(), frame::local_to_lab_direction(), and frame::set_orientation().
|
protectedinherited |
Referenced by frame::orientation(), and frame::set_orientation().
|
inherited |
Referenced by add_bonds(), model::check_internal_pairs(), conf_independent_inputs::conf_independent_inputs(), terms::evale_robust(), get_atom_range(), model::get_ligand_coords(), model::get_ligand_internal_coords(), model::rmsd_ligands_upper_bound(), atom_frame::set_coords(), ligand::set_range(), atom_frame::sum_force_and_torque(), and atom_range::transform().
|
inherited |
Referenced by add_bonds(), model::check_internal_pairs(), conf_independent_inputs::conf_independent_inputs(), terms::evale_robust(), get_atom_range(), model::get_ligand_coords(), model::get_ligand_internal_coords(), model::rmsd_ligands_upper_bound(), atom_frame::set_coords(), ligand::set_range(), atom_frame::sum_force_and_torque(), and atom_range::transform().
| |
LLNL-WEB-613932 |
Lawrence Livermore National Laboratory |
Operated by Lawrence Livermore
National Security, LLC, for the |

|

|

|